

Artículos
Estimación del tiempo de llegada en un canal Rayleigh desde una perspectiva de la cota inferior de Cramér-Rao
ACI Avances en Ciencias e Ingenierías
Universidad San Francisco de Quito, Ecuador
ISSN: 1390-5384
ISSN-e: 2528-7788
Periodicidad: Bianual
vol. 1, núm. 1, 2008
Publicación: 01 Abril 2009

Resumen: Este documento presenta un modelo utilizado para el estudio de los parámetros de interés que modifican la precisión en la estimación del instante de Tiempo de Arribo (TOA) de la señal emitida por un suscriptor móvil que opera en un sistema en acceso múltiple por división en código (CDMA) que hace uso de un receptor RAKE como parte de su operación. Este modelo se ajusta a sistemas tales como IS- 95, CDMA 2000 o WCDMA, para señales que se propagan en condición Rayleigh. Este trabajo muestra el desempeño del receptor en función del número de estimaciones de canal disponibles, el número de sensores que conforman el arreglo de antenas y el tipo de fuente de señal cuando la tasa de muestreo es superior a la tasa de chip. La señal recibida se modela a partir de distribuciones estocásticas, y se consideran tanto los casos de fuentes distribuidas parcialmente coherentes, como los casos de fuentes completamente coherentes y completamente incoherentes.
Palabras clave: Cramer-Rao Bounds (CRB), CDMA, Rayleigh Channel, RAKE receiver.
Introducción
Los sistemas de posicionamiento de suscriptor móvil han adquirido gran relevancia en la última década debido al gran potencial que presentan para la provisión de una nueva gama de servicios basados en localización (LBS), sobretodo en sociedades donde la penetración de usuarios móviles es superior al 60%, tales como las encontramos en América del Norte y Europa por ejemplo, donde según varios reportes el gasto que realizan los usuarios en LBS totalizaron sumas de alrededor de doscientos millones de dólares a finales de 2006.
Si bien es cierto que los esquemas de posicionamiento de unidades móviles en general pueden clasificarse como basados en red y basados en GPS, son muy variadas las técnicas que pueden aplicarse dentro del primer grupo, siendo las más importantes las técnicas basadas en la estimación de la Diferencia de los instantes de Tiempo de Arribo Observados (OTDOA), de forma que incluso se ha estandarizado el uso de esta técnica para sistemas móviles de Tercera Generación.
Un componente fundamental en sistemas móviles que operan con Acceso Múltiple por División de Código (CDMA) es el receptor RAKE que permite identificar las componentes de señal originadas en propagación multitrayecto, y posibilita su aprovechamiento en términos de diversidad.
Los resultados mostrados en este artículo asumen que el proceso de estimación del primer retardo se hace para un sistema CDMA que utiliza un receptor RAKE, y que el proceso de estimación del primer retardo es el mejor posible. En efecto se estudia el impacto que se tiene sobre la precisión en la estimación del TOA para el primer retardo en función de parámetros tales como: el número de estimaciones de canal disponibles, el número de sensores que constituyen el arreglo de la antena, el grado de coherencia temporal en las estimaciones de canal que se utilizan para el proceso de estimación de TOA y el período de muestreo cuando éste se realiza a una velocidad mayor que la tasa de chips del sistema.
Materiales y métodos
Este trabajo está muy relacionado con otro anterior, en el que se estudió el impacto de varios de estos parámetros, pero bajo el supuesto de que la tasa de muestreo de la señal se realizaba a la tasa de chip [1].
Para este estudio se considera una señal dispersa caracterizada estocásticamente, y el error en la estimación del instante de llegada (TOA) se calcula utilizando la Cota Inferior de Cramer-Rao (CRB) a partir del modelo de señal que describe el escenario móvil.
El modelo toma en cuenta las siguientes consideraciones:
1. Se asume que el canal tiene un tiempo de coherencia para las amplitudes que siguen las expresiones de Jake usuales, sin embargo, el tiempo de coherencia de retardos y ángulos de llegada es mucho mayor, siendo posible obtener muchas estimaciones de canal a objeto de mejorar la precisión de las estimaciones de TOA.
2. El ruido presente en las estimaciones de canal es blanco y gaussiano.
3. El ruido es incoherente en retardo y ángulo, lo cual corresponde a una situación en la cual el suscriptor móvil se mueve y los diferentes rayos reflejados experimentan desvanecimiento rápido incorrelado.
4. Se asumen un modelo lineal de Markov de primer orden para la variación temporal en el canal.
5. Un espectro de potencia continua se utiliza para modelar la función de densidad marginal de retardo, y se asume que esta se ajusta a una exponencial según se propone en Pedersen [2], y se la estima a una fracción del tiempo de chip. Se asume también la misma distribución angular para todos los retardos.
Este modelo es muy conveniente para propósitos de localización puesto que interesa calcular tan solo algunos parámetros de interés en lugar de todos los retardos, lo que complicaría el modelo innecesariamente y tornaría su solución demasiado complicada en escenarios altamente dispersivos.
Un espectro de potencia continua se utiliza para modelar la función de densidad marginal de retardo, correlación espacial, R ( ), contiene los coeficientes de correlación para las firmas entre sensores, y denota el producto de Kronecker
Modelo De Canal
El vector de canal, z(j)(k), para un sensor particular “j” y un lag “k” puede modelarse en términos del coeficiente correspondiente con el cual la señal firma sobre el arreglo de sensores en la antena, bj, la potencia estimada para el trayecto recibido, Pi, su frecuencia Doppler normalizada fi, y el vector correspondiente al pulso conformador g(i); además de una componente de ruido w(j)(k), donde k0 corresponde al instante de muestreo para el primer retardo.
 [1.1]
[1.1]El vector g(i) contiene las muestras del pulso conformador, siendo “i” la posición de su máximo, gp(0), y se muestra en (1.2).
 [1.2]
[1.2]Si el vector de canal, z(j)(k), y su correspondiente vector de ruido se arreglan como se muestra en (1.3), tanto la señal como el ruido pueden describirse como procesos aleatorios Gaussianos de media cero y con ciertas matrices de correlación como se indica en (1.4). Se asume que el ruido es temporalmente incorrelado, independiente de la señal y de varianza w 2. La matriz de correlación para las estimaciones del vector de canal, Rz, puede expresarse en términos de sus componentes temporal y espacial, como se muestra en (1.5). En esta expresión, el factor de potencia de la señal Ps, se refiere a la varianza de la potencia recibida estimada para el primer retardo de la señal temporalmente dispersa en el caso de propagación Rayleigh; la matriz de conformación de pulso, Gs( ), modela la contribución del pulso conformador, mientras que es una matriz diagonal que modela la dispersión temporal de la señal y su distribución de potencia exponencial. Por otro lado, la matriz de correlación temporal, T( ), toma en consideración la variación temporal del canal, y se asume idéntica para todos los retardos; la matriz de correlación espacial, R ( ), contiene los coeficientes de correlación para las firmas entre sensores, y denota el producto de Kronecker.
 [1.3]
[1.3]
 [1.4]
[1.4]
 [1.5]
[1.5]La ecuación (1.6) muestra el modelo exponencial usado para los retardos, en términos de la posición del primer arribo, k0, y del inverso de la dispersión de retardos normalizado para el tiempo de chip
 [1.6]
[1.6]La matriz de correlación espacial, . ( ) se modela como en (1.7), .( ) como un proceso auto-regresivo (AR) de primer orden, como se muestra en (1.8); y la forma general para Gs se exhibe en (1.9). es el coeficiente de correlación temporal entre dos vectores de canal consecutivos, y ij es el coeficiente de correlación entre los sensores “i” y “j”. Note también que .s corresponde a la matriz identidad cuando el muestreo se realiza a la tasa de chips
 [1.7]
[1.7]
 [1.8]
[1.8]
 [1.9]
[1.9]Observe que cada uno de los vectores de conformación de pulso, gsi, en (1.9) puede modelarse como en (1.10), donde sus elementos gk se describen por (1.11). Más aún, es el factor de roll-off, y Nspc corresponde al número de muestras adquiridas por período de chip:
 [1.10]
[1.10]
 [1.11]
[1.11]Los elementos de la matriz de correlación espacial, ., se calculan como se muestra en (1.12):
 [1.12]
[1.12]Derivación de las Cotas de Cramer-Rao
Las cotas de Cramer-Rao (CRB) son muy útiles en la cuantificación de los errores que resultan de la estimación de parámetros de un modelo estocástico. Para el modelo en (1.4), (1.5) se define el vector de parámetros, , en (1.13), donde es un vector que contiene las partes reales e imaginarias de los coeficientes de correlación entre sensores, tal como se muestra en (1.14).
 [1.13]
[1.13]
 [1.14]
[1.14]En este vector de parámetros, k0 se refiere al instante de la primera llegada normalizado para el tiempo de chip, Tc; n es el inverso de la dispersión de retardos normalizado para el intervalo de chip, y los demás parámetros ya han sido definidos antes. El parámetro de interés es precisamente k0.
Adicionalmente, note que Nc cuenta el número de coeficientes de correlación espacial y se relaciona con el número de sensores como se muestra en (1.15).
 [1.15]
[1.15]Las CRB para este modelo se calculan a partir de la Matriz de Información de Fisher (FIM), cuyos elementos se calculan como se muestra en (1.16)[3]:
 [1.16]
[1.16]Si la matriz de correlación espacial, . ( ), se descompone en términos de sus autovalores, , y de sus autovectores, . ; y se define . como la matriz que contiene los autovectores, y , como la matriz diagonal que contiene los autovalores, como se exhibe en (1.17); y un procedimiento análogo se utiliza para la matriz de Correlación Temporal, .( ), como se muestra en (1.18), y se reemplazan estas expresiones en (1.5), es posible encontrar una expresión simplificada para .z-1, que se muestra en (1.19).
 [1.17]
[1.17]
 [1.18]
[1.18]
 [1.19]
[1.19]Las derivadas de Rz, respecto a los parámetros en (1.13) toman la forma en (1.20), siendo Ai, Bi y Ci las matrices que se contienen en la Tabla 1.
 [1.20]
[1.20]Si se reemplazan la expresión para Rz-1 en (1.19), y las derivadas en (1.20) en (1.16), puede demostrarse que la FIM puede calcularse por la expresión (1.21).
 [1.21]
[1.21]
| i=p,q | i | Ai | Bi | Ci |
| 1 | k0 | R | T | T PsGs Gs k0 |
| 2 | n | R | T | Ps n |
| 3 | R | T | T Ps (Gs Gs ) | |
| 4 | Ps | R | T | Gs G T s |
| 5 | 2 w | INs | IK | IN |
| 6 | R | T | Ps.Gs G T s | |
| 7:6+Nc | i-6,Re | R i-6,Re | T | Ps.Gs G T s |
| 7+Nc: 6+2Nc | i-6,Im | R i-6,Im | T | Ps.Gs G T s |
Donde la FIM para este modelo se relaciona con la FIM calculada para un vector reducido de parámetros que se muestra en (1.22) conforme se indica en (1.23) y (1.24), a través de la matriz Hk,k1 que se muestra en (1.25).
 [1.22]
[1.22]
 [1.23]
[1.23]
 [1.24]
[1.24]Las derivadas respecto al vector de coeficientes de correlación entre sensores requeridas en (1.25) se calculan como se muestra en (1.26)-(1.28).
 [1.25]
[1.25]
 [1.26]
[1.26]
 [1.27]
[1.27]
 [1.28]
[1.28]El término C1 requerido en (1.21) modela el efecto del coeficiente de correlación temporal, , sobre la FIM, como una contribución de la diversidad espacial y temporal, mientras que los términos C2 (q1,q2) corresponden a la contribución de los coeficientes de correlación espacial a la FIM. El vector .v(i) se introduce por conveniencia de notación y se muestra en (1.29).
 [1.29]
[1.29]Note en (1.30) -(1.33) como F1 corresponde a la contribución de las estimaciones temporales y F2 modela la diversidad temporal y el efecto del pulso conformador.
 [1.30]
[1.30]
 [1.31]
[1.31]
 [1.32]
[1.32]
 [1.33]
[1.33]Los términos C2(q1,q2) se definen en (1.34)-(1.36) y se calculan como resultado de la diversidad temporal y espacial. Los términos E1 corresponden precisamente a la contribución espacial, mientras que los términos E2 se relacionan con la diversidad temporal debida al receptor RAKE y al efecto del pulso conformador.
 [1.34]
[1.34]
 [1.35]
[1.35]
 [1.36]
[1.36]Las derivadas de los auto-vectores de la matriz de correlación temporal respecto al coeficiente de correlación temporal, , requeridas en (1.31) se calcularon numéricamente para obtener las cotas de Cramer-Rao en este artículo.
Resultados y discusión
A continuación, se presentan algunos resultados de interés que relacionan el error en la determinación del primer retardo con algunos parámetros relevantes del modelo.
Comportamiento del Error en la estimación del Instante de Llegada de la señal (TOA) cuando se utilizan múltiples sensores en diversidad y el vector de canal se muestrea a la tasa de chip.
La figura 1 muestra el comportamiento del error de estimación cuando se utilizan señales de varios sensores. El ejemplo propuesto corresponde a las cotas para un entorno con una dispersión angular de 10° y una dispersión temporal de 2Tc, cuando se utilizan 4 sensores espaciados /2; el cual bien podría corresponder al caso del enlace ascendente en el que las mediciones se realizan en la estación base (BS). La gráfica revela que la adición de múltiples sensores en el arreglo de la antena mejora la estimación del primer retardo significativamente. Así se tiene que para una relación señal a ruido de 10 dB, la cota del error en la estimación del primer retardo se reduce desde alrededor de 0,85Tc cuando se usa un único sensor hasta aproximadamente la mitad (0,44Tc) cuando se emplean cuatro sensores y la fuente de señal se modela como parcialmente coherente
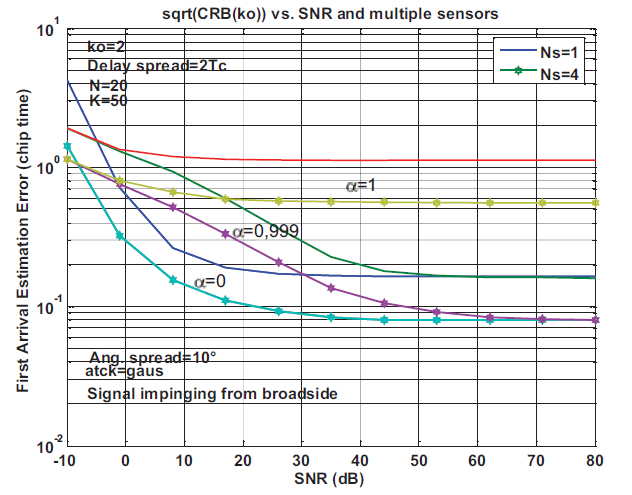
con un factor de correlación temporal, =0,999. La situación es algo mejor para fuentes de señal incoherentes ( =0). En este caso el error se reduce desde aproximadamente 0,23Tc cuando se emplea un sensor hasta cerca de la mitad cuando se emplea un arreglo con cuatro sensores. El peor caso corresponde a fuentes de señal completamente coherentes. El error en este caso es de alrededor de 1,2Tc para un sensor y se reduce hasta algo más de la mitad cuando se utilizan cuatro sensores.
La dispersión angular no es un aspecto especialmente relevante, a pesar de que el mejor caso corresponde a sensores completamente incorrelados, y que el error de estimación presenta una pequeña reducción conforme la dispersión angular reduce.
Comportamiento del Error en la estimación del Instante de llegada de la señal (TOA) cuando la estimación del vector de canal se realiza a dos veces la tasa de chip.
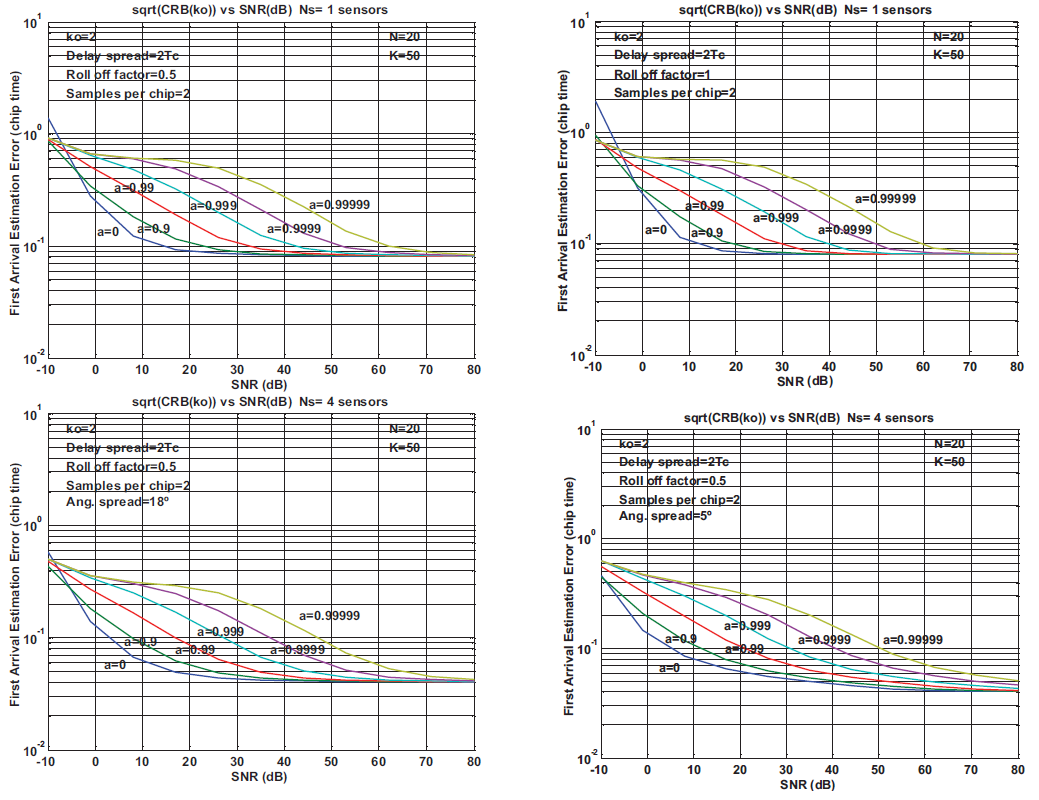
La figura 2 muestra el comportamiento de la cota del error en la estimación del primer retardo el vector de canal se muestrea a dos veces la tasa de chip, para diferentes valores del factor de roll-off, , y muestra como una mejoría marginal apenas se alcanza cuando se modifica el factor de roll-off de 0,5 a 1. Por otro lado si estos resultados se comparan con los que se muestran en la figura 1, el error en la estimación de TOA se reduce ligeramente. Así por ejemplo, se observa que para un factor de correlación temporal, , de 0,999 y cuando se emplea únicamente un sensor, el error en la estimación del primer retardo es de alrededor de 0,85Tc para una
SNR de 10dB y de alrededor de 0,2Tc para una SNR de 40dB, cuando el muestreo se realiza a la tasa de chip, y que este valor reduce a alrededor de la mitad cuando la tasa de muestreo es dos veces más rápida.
La figura 2 muestra que resultados similares se esperan con independencia de la dispersión angular de la fuente de señal. Sin embargo, ligeras ganancias se consiguen cuando la dispersión angular es mayor, especialmente
cuando la relación señal a ruido, SNR, es baja. Por ejemplo, el error en la estimación del primer retardo cuando la SNR es de alrededor de 5dB y se emplea una antena con 4 sensores se reduce desde alrededor de 10-1
Tc hasta 8x10-2Tc cuando la dispersión angular crece desde 5° hasta 18° y se utilizan estimaciones del vector de canal temporalmente incorreladas; y se reduce desde 4x10-1Tc hasta alrededor de 3x10-1Tc cuando las estimaciones del vector de canal están altamente correladas ( =0,99999). En forma similar, el error en la estimación del primer retardo cuando la SNR es de alrededor de 50dB mejora de 10-1Tc a 8x10-2 Tc para el
caso en que la fuente de señal está temporalmente muy correlada ( =0,99999).
Finalmente, es importante destacar que el error de estimación del primer retardo se mantiene prácticamente invariante con respecto a la dispersión temporal de la fuente y que la precisión mejora cuando el número de
estimaciones de vector de canal disponibles aumenta, sobretodo cuando la fuente de señal es temporalmente incoherente, es decir para valores bajos de .
Referencias bibliográficas
1. Játiva, R.; Vidal, J. 2003. “La Cota Inferior de Cramer-Rao en la Estimación del Instante de Llegada al usar Modelos de Fuente Distribuida”. Revista CIENCIA Vol.6, N.2, 185-196.
2. Pedersen, K. 2000. “Antenna Arrays in Mobile Communications – Channel Modeling and Receiver Design for DS-CDMA Systems”, Tesis Doctoral de la Universidad de Aalborg.
3. Kay, S. 1993. Fundamentals of Statistical Signal Processing – Estimation Theory. New Jersey: Prentice Hall.

